机器人
套上马达,让精子飞起来
友情提示:文章太长,不用看,直接看图就行!
要实现用微型机器人进行诊断和治疗,还有很多问题要解决,如何下手?Mariana Medina-Sánchez 和Oliver G. Schmidt这俩牛人倾情风险如下攻略:
科学家正在设计微型装置,微型机器人和微型马达,最终实现在人体内执行医疗任务。把人工合成的细胞级别大小的条棒、管子、螺旋体、球体或笼子送入血液、肝脏、胃或□□进行诊断,药物传递或手术。目前为止大部分的微型机器人实验都在体外环境下进行,与人体内的环境有很大不同。许多微型装置依赖像过氧化氢这样的有毒燃料。在培养皿中操控这些装置很容易,但在充满蛋白质和细胞的生物体液这样复杂的人体内却很难。
要想进行真正意义上的临床测试,微型机器人必须跨越两个主要的障碍。首先,研究者要有能力在人体内去看见和操控这些微型机器人,而现有成像技术的灵敏度和分辨率并不能满足这一需求。其次,这些微型机器人要能够与生物体兼容,不能引起生物体的排斥反应,而且在用完后可以被移除或处于稳定状态,不能影响人体的正常功能。要实现这两点需要在操控性和机动性、材料和性能方面进行提升。
我们号召微型机器人的研究者,材料科学家、生物成像和医学专家联合起来,一起去克服这些难题。监管机构需要出台相关指导原则,规范基于微型机器人的治疗方法。
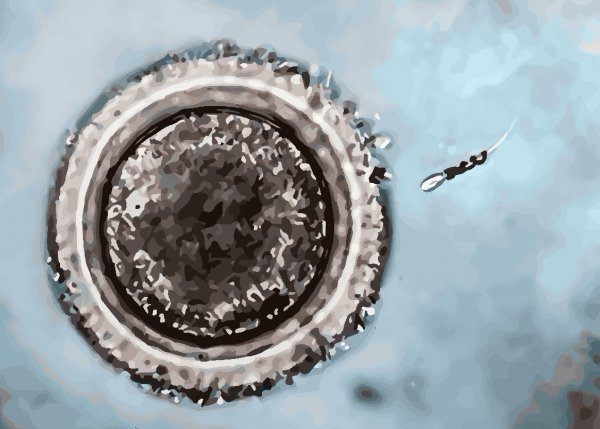
图注:用一个螺旋状的微型马达帮助不游动但健康的牛精细胞靠近培养中的卵细胞并完成受精。
根据推进模式,微型马达可分为化学、物理和生物这三类(如下图),各有其优缺点。
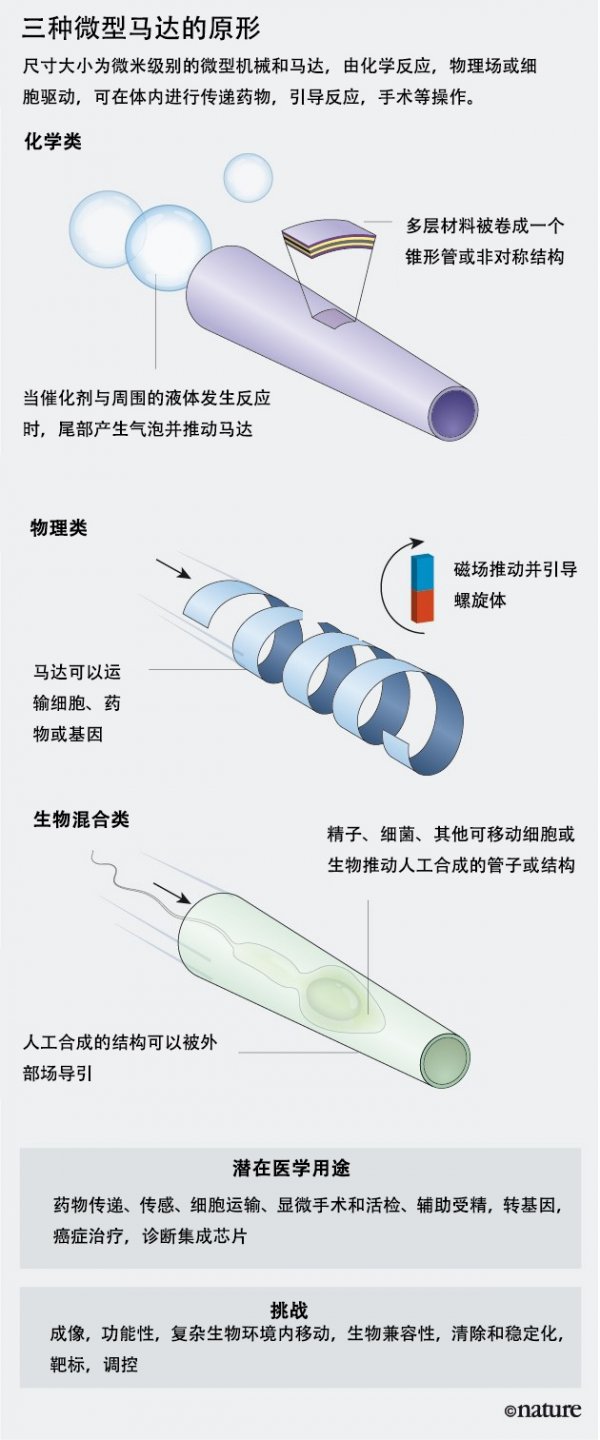
化学类微型马达把燃料能源转化为动能。一般通过微型马达内的催化剂(如铂,银或钯)与周围液体(常用过氧化氢或其他有机组分)间的催化反应产生动能。这种马达很难控制。有些是通过在一个非对称管子的一端喷发气泡来移动,而有些是用两种金属材料(一般用金和铂)制造,不同材料其表面在张力,燃料消耗或吸光率上会有不同,以此产生动能。通过这些微型马达周围的化学或热度梯度来导航,也可以施加磁场,光照、超声波等导航。
在体外,微型马达可以用有毒燃料。比如,可在水中燃烧污染物作为燃料,或者芯片或生物传感器上的有毒化学物质。而在人体内使用的话,需要体内物质作为燃料,例如葡萄糖,尿液和其他生理液体。比如,可通过老鼠胃酸对锌的溶解来驱动管式微型马达。这些马达的耐受性和效率需要进一步提升。
物理类微型马达通过各种场来推动。例如,一种由磁性材料制成的螺旋状马达,在旋转的外部磁场作用下可沿其轴线进行不断旋转。这些装置更容易操控,只要改变外部磁场的方向和频率就能改变马达的方向和速度。这样的“磁游泳”装置是模拟鞭毛运动,一些微生物是靠鞭毛驱动的。超声波同样也可以用来驱动和导航。此类微型马达的推力比化学类的要小,需要复杂的舵机系统。可被用来搬运货物(如传感器,药物和基因治疗),不活和运输细胞以及显微手术和活体检查。

图注:一种由磁性材料制成的螺旋体,在旋转的外部磁场作用下捕获不会运动的牛精子,然后驱动精子接近牛卵细胞,完成受精。
生物混合类微型马达是生物组分(如细菌、肌肉和精细胞等)和人工合成元件相结合的产物。当它们移动时会感知生化物,酸度或磁场并做出应答。例如,可感知地球磁场的细菌,已经被开发作为潜在的血管内药物载体。这些生物混合类的游泳者可以自然的在人体内通行,可以通过组织把药物传递到更深的地方,还能进行受精作用。我们已经示范过如何使用一个载有药物的移动的精细胞与磁性微结构联合,在后者的导引下在生殖系统中释放精子药物复合物。这种方法有治疗生殖系统癌症潜在价值。我们使用旋转的磁铁去驱动螺旋形的物理微型马达,把一个活的但无法移动的牛精细胞传递到卵细胞内。这一“精器人”可成为一种新的辅助生殖技术。精子数量少活力弱是男性不育的两大原因,约40%的不育由此引起。如果精器人能够捕获精子并导向卵细胞,在体内完成受精,会提高受精的成功率,而且是侵入性较低,胚胎也能在更加自然的环境中发育。
实际应用中的挑战
如前所述,制作这三种微型马达的材料必须具有生物兼容性(例如高分子聚合物、金和锌、蛋白和DNA)或者可生物降解(例如藻朊酸盐、明胶、碳酸钙);具备执行多种任务的能力:从对环境的感知和应答到可被物理或特定分子、疾病标志物、温度、酸碱度激发的分子或细胞的存储和转运;在三维空间、粘弹性体液和仿真体模中的可操作性要更强;靶向定位要精准。
在实际应用之前,我们应该首先考虑如何把这些微小的运输工具从体内移除或停止其功能。可以让它们从哪里来再回哪里去,比如再把它们驱使回嘴、眼睛、耳朵、□□、尤瑞色。但是这一过程缓慢耗时,特别是当体内有很多这些微型工具的时候。也可以像组织工程支架那样,被降解并随着代谢产物一起被吸收或自然排泄出体外。生物降解材料如壳聚糖、聚乳酸、聚环酮,会在一定的pH、温度或时间内降解。但是仍然存在少量的磁性物质、金属或氧化物,这些物质的降解过程和毒性需要研究清楚。稳定的仿生器械可埋植于体内监控器官的功能。

图注:化学驱动的400纳米大小的微型喷气马达,通过分解过氧化氢来释放氧气泡。
监管落后于研究。尽管微型马达离临床应用还很远,但是一些微米或纳米级别的被动疗法已经获得了批准。例如,纳米银颗粒被用来制作抗菌绷带。还有把药物装入细胞、利用细胞机制修饰基因或传递药物等治疗方法,如果对它们的副作用能有更多的了解,这些治疗方法将会更有针对性和个体化。
在美国,活体生物产品,包括某些疫苗,是受FDA监管的,必须通过动物和人体测试。而作为活体和人工合成物的组合体的微型马达更加难以评估,作为材料、微生物、微结构和功能的复合体,微型马达的所有方面都需要在人体内一起测试。
未来展望
微型装置的体内追踪至关重要。当前的成像技术,如放射学,超声波,红外和磁性磁共振成像(MRI)等检测人体都太粗糙,不灵敏且缓慢,更不用说人体内的微型马达了。放射学和核医学中所使用的放射性同位素在高剂量或长时间照射的情况下会很危险。一般的临床MRI(最大磁场强度为3特斯拉)分辨率可达到300微米,足够对血管进行成像。高强度磁场(10-12特斯拉)能达到100微米的分辨率,但是设备昂贵。MRI要花费数秒的时间去扫描而加速扫描会让分辨率变差。
需要新的成像方法。理想的成像方法可以为皮肤下10厘米处的微型马达成像,而且是3D。可分辨1-50微米的装置,并且能够以每秒10微米左右的速度移动(细菌和精子的移动速度)以追踪微型马达。最好能够在数小时内保持毫秒的精确度。

图注:由磁性材料制作的气泡驱动微型马达,在旋转磁场的作用下做环形运动。
目前成像研究者正在研究如何把光波、声波和电波成像中影响成像质量的两大因素:衍射和散射最小化。灵敏度和曝光时间主要受对比度影响,为了增强对比度,可使靶细胞和微型装置的化学部分在受到激发的时候变暗或发荧光(比如量子点技术)。另外通过使用较小的反射体,超声波信号可能会被增强。
这些新技术结合起来使用的效果令人鼓舞,例如,Christian Wiest及其同事开发的多谱线光声断层摄影术使红外和超声成像技术达到了新的高度。当激光脉冲照射到组织后,组织会有扩张与收缩,发出脉冲超声波,然后据此生成3D图像。这些图像有高对比度和空间分辨率。只要控制好光和超声波的频率,就可以产生多种特定波型。此方法可达到150微米的分辨率,可探测深度为2-3厘米。随着技术的不断改进,相信它能在未来几年内足以实现追踪微型机器人。
尖端超声方法也在快速改进。全息成像技术,将光场编码成照片中的干涉图样,在微小物体的成像和控制方面很有前途。我们研发小组正在研究是否可以通过检测微型机器人所反射,传播或发射的特定频率的红外光来确定其方向和速度。
该领域研究者应当做好准备,在未来两年,可能出现足够好的可视化系统,将开始测试并追踪活体动物体内的微型装置。微型机器人的研究者们需要建立起操纵微型机器人的机制方法。例如利用超声波和磁场可以引导蜂群飞向生化感应器指定的区域。我们的目标是微型机器人可以感知、诊断和自主行动,而由人对其进行监督和保持控制以防故障的发生。
# 相关研究:
小蝌蚪的新用途:精细胞变身运输工具
小蝌蚪游不快?不如装个小马达