机器人
能奔跑、做俯卧撑甚至也会流汗的机器人
东京大学的科学家和工程师开发出了一种紧密结合人体解剖学的人形机器人。其他的类人机械是由刚性部分构成,这就限制了它们的运动范围,但是这些叫做Kengoro和Kenshiro的新机器人拥有肌肉骨骼系统,其关节和肌腱状部分以更加像人的方式屈伸和弯曲。
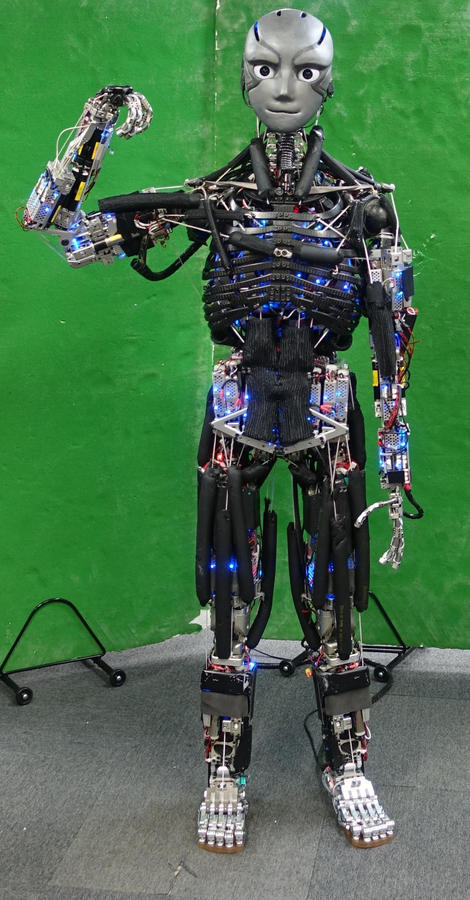
机器人Kengoro |Image: Asano, Okada, Inaba, Sci. Robot. 2, eaaq0899 (2017)
它们还携有嵌入式传感器充当感觉神经系统,加上类似大脑的能处理器,可以利用信息(数据)执行操作,而不需要人类直接操控。机器人可以做俯卧撑、仰卧起坐、引体向上、提踵和背部伸展;像我们人类一样,他们在锻炼过程中会出汗。为了模拟我们人体的结构,研究人员甚至为他们设计了一套人造汗液系统来释放电机产生的热量。
他们在《科学机器人》(Science Robotics)杂志上发表的一篇研究论文中写道:“传统机器人的局限性在于,它们是基于传统工程、力学、电子学和信息学的理论设计的,主要用于以工程为导向的应用,例如完成日常生活中的任务、作为人类的个人助理或应对灾难□□件。”
相反,他们以人体系统为基础设计了Kengoro和Kenshiro,最终目标是为未来的科学研究提供一个平台。对于任何涉及人体运动的科学研究而言,新型机器人都是非常有用的工具。他们就像细节逼真、与我们高度相似的碰撞测试假人。事实上,碰撞测试正好就是他们的一个潜在的应用。如今的碰撞测试假人只是被动地模拟车祸中的运动,但是真人在遭遇车祸时,情形要复杂得多。面对天降横祸,我们可能会□□紧牙关,抓住方向盘,绷紧全身肌肉。更灵活真实的碰撞测试假人可以帮助为安全测试提供更加准确的信息。
另一个可能的研究用途是体育运动学——田径。由于机器人可以像人类一样行动奔跑,因此可以用他来研究摆动上肢迈出步幅的最佳方式,或者用它来试验找出投掷得最远更高的理想抓握方式。他们也可以帮助我们研究预防和治疗运动相关的损伤。机器人将被用来开发更好的假肢,替代原本的人体组织;研究人员甚至提出完全人造身体的设想。
他们使用人体统计数据来构建具有完全人性化比例的人造身体部位。为了模拟人体肌肉和肌腱之间的连接,他们设计出了独特的执行器,使得关节具有更大的自由度,因此Kengoro和Kenshiro比以往的机器人运动得更加流畅。


