机器人
半机械蟑螂,地震搜救的未来?
从可驾驶的仿生动物到由肌肉制成的机器,生物混合机器人正在走向各种应用。
2011 年 3 月,Hirotaka Sato在东京遭遇了地震。地震摧毁了数万栋建筑,并引发了海啸,袭击了日本东海岸,包括福岛核电站。超过 18,000 人死亡或失踪。Sato看着绝望的搜救任务展开,心想:“我需要开发技术来拯救人们。”
他很快想到并一直努力的解决方案是半机械昆虫。他想象着一群活生生的生物在瓦砾中穿梭,必要时由植入昆虫神经系统的外科植入电极远程控制。这些生物将携带能够识别幸存者的传感器,以及将他们的位置传给救援人员的信号发射器。
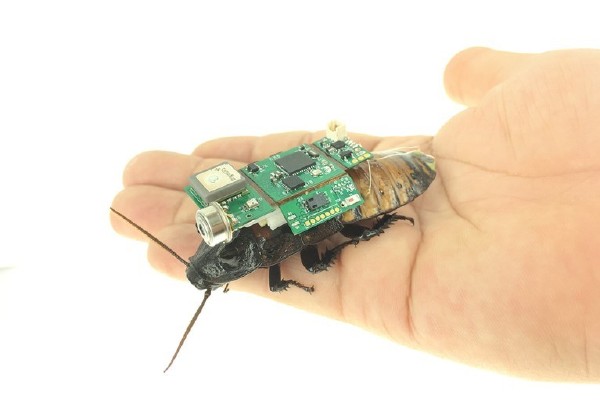
Sato现在是新加坡南洋理工大学的一名工程师,他选择了马达加斯加嘶嘶声蟑螂 (Gromphadorhina portentosa) 作为他的救援队基础。这些长 5 厘米的生物可以携带多达 15 克的安装技术,目前包括一台红外摄像头和一个能够检测活人的处理器。Sato的团队可以通过遥控器操纵昆虫向左、向右和向前移动,或者让它们自主导航到预编程的目的地。研究人员目前正在改进跟踪和通信系统,使半机械生物能够告诉救援人员在哪里找到需要帮助的人。
Sato的实验室是世界上数十个致力于生物混合机器人学新兴领域的实验室之一,该学科旨在将工程师结合常规金属和塑料部件以及活的生物组织来制造机器人。宾夕法尼亚州匹兹堡卡内基梅隆大学的工程师 Victoria Webster-Wood 说:“生物混合体是指任何结合了生物材料和合成材料的机器人。”
研究人员使用的生物材料的类型和数量差异很大,他们试图解决的挑战也各不相同。对于像 Sato 的搜救蟑螂这样的半机械人,机器人学家利用了基本完整的生物系统的自然能力。在其他情况下,研究人员正在探索少量的活体组织——例如,一个会发臭的飞蛾触角2,或一层人类皮肤3——如何为其他传统机器人提供特定功能。一些最雄心勃勃的项目将活细胞置于机器人设计的核心,例如那些试图构建强大、自我修复的肌肉,机器人可以使用它们来移动。
尽管他们的方法不同,但大多数参与的研究人员都对利用自然来推进机器人技术有着共同的兴趣。但正如该领域的工作人员非常清楚的那样,将生物混合机器人完全带入生活仍然存在严重障碍。
驾驭自然
2011 年初,Sato刚刚完成加州大学伯克利分校 Michel Maharbiz 实验室的四年工作。Sato的工作由美国国防高级研究计划局 (DARPA) 资助,旨在通过使用小型机载计算机控制活体飞行甲虫 (Mecynorrhina torquata) 来绕过从头开始构建厘米级飞行机器人面临的困难。劫持甲虫的自然能力不仅绕过了飞行工程挑战,而且还产生了具有自供电能力和复杂的传感器系统来帮助导航世界的半机械人。
当东北部地震发生时,Sato只需一个小的概念飞跃——用奔跑的蟑螂代替飞行的甲虫——就可以设想出一种可以在地震夷为平地的建筑废墟中穿行的半机械人。救援人员长期以来一直使用狗(及其非凡的嗅觉)来搜索危险的地震现场。几十年来,工程师们一直在开发机器人做同样的事情。然而,与狗一样,当面对成堆的瓦砾时,大多数机器人只能在表面移动。要探索内部,需要更小更坚固的东西——更像是蟑螂。
Sato宏隆希望利用数百只半机械蟑螂自主探索搜索区域。但要确保它们留在目标区域内,Sato需要一种控制它们运动的方法。
他是这样做的:将电极附着在昆虫身体的某些部位,可以由远程人类操作员或机载计算机控制。电刺激蟑螂左侧的触觉受体或肌肉会使昆虫向右移动,反之亦然。Sato说:“我们利用昆虫的自然行为来诱导转弯。”同时刺激左侧和右侧的运动会推动蟑螂向前。该小组的最新原型使用机载计算机运行的导航算法,根据红外摄像头检测到的内容控制昆虫的方向。障碍物回避是通过监控蟑螂的运动来实现的——如果它被障碍物阻止,导航算法将指示昆虫远离障碍物并找到绕过它的方法。
Sato指出,小型全合成机器人——其开发正在快速推进——也可以通过类似的环境移动。但半机械昆虫可能具有一个重大优势:工作时间。
Sato说:“我们只能在小型机器人上放置一个小型电池。”由于该电池必须为机器人的耗能动力系统以及其有效负荷设备供电,他说,“人工机器人只能移动几分钟”。相反,半机械昆虫的运动由进食和饮水提供动力,这意味着小型机载电池只需要为视觉和通信系统以及用于操纵昆虫的低功率设备供电。
他的团队的最新原型的工作时间约为八小时,但Sato希望将来可以通过从太阳5或昆虫的血淋巴6中收集能量来显著延长这一时间——后者是无脊椎动物的血液。他希望在未来 3-5 年内部署这些生物混合机器人在灾区。
Sato并不是唯一在开发动物半机械人的工程师。科罗拉多大学博尔德分校的工程师 Nicole Xu 在加利福尼亚州斯坦福大学的工程师 John Dabiri 实验室完成了她的博士学位,现在在帕萨迪纳的加利福尼亚理工学院 (Caltech) 工作。他们一起探索了如何控制水母游泳的方法。徐解释说,目标是使用携带传感器的水母群来监测气候变化和其他生态变化对海洋大面积的影响。
水母使用泵送动作游泳——一圈神经使它们的身体收缩,从而向前推进。徐证明,通过使用木制牙签将电极附着到水母上并以特定模式刺激神经环,她可以使动物游动速度几乎是正常速度的三倍。
为了测试半机械创造物是否经受住了海洋条件,它们被从马萨诸塞州海岸的一艘船上扔下。水母仍然以升高的速度游动。徐说:“这真的很棒,因为我们对波浪和这些机器人的坚韧程度有了了解。”
水母具有许多对机器人学家具有吸引力的特性。它们是节能游泳者,能够下潜到很深的地方。徐说,与目前的机械潜水器相比,水母不太可能对海洋环境造成损坏。它们的自然外观和安静性也使它们不起眼——在海洋测试中,鱼游到它们身边。
半机械水母的发展阶段比Sato的蟑螂要早得多,正在 Caltech 的 Dabiri 实验室进行改进。未来的任务包括找到一种方法来控制动物而不是仅仅加速它们,并确定它们可以携带什么传感器——例如摄像头或化学探针——而不影响其浮力。与这样的深水半机械保持通信也提出了挑战。
智能设计
虽然利用动物完整的身体和神经系统比从头开始建造机器人具有优势,但如此完全地利用自然的创造物也带来了限制。Webster-Wood 说:“每当我们劫持一个现有的生物体,我们就局限于进化所产生的功能和体型因素。” 她和其他研究人员的目标是将生物材料作为他们自己设计的机器人中的构建块——这些机器人将被设计用于特定的应用。
到目前为止,这项工作的重点大多是肌肉。Webster-Wood 解释说,在选择机器人设计中使用的执行器类型时,机器人专家会考虑各种指标,包括其相对于重量产生的力和能量效率和耐久性。虽然肌肉在任何一个指标上都没有获得最高分,但它在多个指标上都表现良好。Webster-Wood 说:“现有的执行器存在一些严重的限制。特别是对于小型机器人。”
例如,几种类型的电动机——例如压电电机——可以改变刚度和形状,但很难将它们缩小到与小肌肉相同的尺寸。而且这种电机需要巨大的电池。
生物肌肉还具有合成执行器目前无法提供的特性。麻省理工学院的机械工程师 Ritu Raman 通过将来自小鼠的骨骼肌细胞与合成水凝胶支架相结合,构建了厘米级的机器人。当通过电刺激或(经过基因改造后)通过光脉冲使这些肌肉细胞收缩时,这些机器就会在培养皿中推进自己。
Raman 越频繁地刺激机器人,肌肉每次产生的力量就越大——这类似于一个人训练举起更重的重量。这种强化可能很有用,因为它可以让机器人更好地完成现实世界中重复的任务。
令人惊讶的是,Raman 还展示了如果肌肉被切断,然后再添加干细胞和生长因子,生物混合机器人会自行修复。她说:“它可以在几天内完全恢复其产生的力量和行走速度。” 她的计划是未来的设计将从一开始就包含干细胞,以实现自我修复。
为了更好地控制运动,Raman 现在正在开发连接到神经元的肌肉系统,这些神经元可以像动物一样触发收缩。从长远来看,她旨在使用可以感知外部刺激的生物神经元网络,使它们能够响应环境线索移动。
使用生物材料的另一个主要优点是它们会自然降解——如果被捕食者吃掉,它们也安全食用。Webster-Wood 说:“我们完全支持生物降解。” 她说,机器人研究人员有基本的责任考虑他们使用的组件及其在机器人没有被回收时的命运。事实上,除了她使用的活肌肉细胞外,Webster-Wood 也正在探索使用天然蛋白质作为机器人的结构和电气部件。
像 Xu 一样,Webster-Wood 也热衷于开发监测水生生态系统的方法,例如美国和加拿大之间五大湖中是否存在有毒藻华。对于这项任务,她正在测试的肌肉组织比 Raman 和其他人使用的来自小鼠的肌肉有一个重要的优势:它不是来自哺乳动物,哺乳动物的肌肉必须在定制的营养液中保持大致等于体温的温度,而是来自加利福尼亚海蛞蝓——她形容这些动物“超级强壮”。
Webster-Wood 说,Aplysia 肌肉可以在比脆弱的哺乳动物肌肉更宽的环境条件下工作。毕竟,这些海蛞蝓生活在潮汐岩池中,经历巨大的温度和盐度变化。当在人工海水(几乎会立即杀死哺乳动物组织)中测试她的生物混合作品时,Webster-Wood 看到它们运行了大约一个小时。然而,一个环境监测机器人可能需要更长的时间才能发挥作用,因此还需要做一些工作来延长它们的寿命。
手段还是目的?
然而,并不是所有制造生物混合机器人的人都需要担心他们的作品在实地操作中会如何表现。波士顿哈佛大学的生物医学工程师 Kit Parker 说:“我将生物混合机器人视为一种实验工具。” 他说:“这就是我了解心脏的方式。”
大约 14 年前,Parker 带着他的女儿去了波士顿的新英格兰水族馆。当时,他和他现在一样,对有多少临床心脏病学试验失败感到沮丧,他越来越认为这是由于一个基本的缺陷:“我们不理解肌肉泵的基本规律,”他说。
站在水母缸前,他心想:“哇,这东西就像心脏一样在泵血。” 然后,第二个念头来了:“我敢打赌我可以建造它。”
在 2012 年发表的一篇具有里程碑意义的生物混合论文中,他和他的同事们做到了这一点。该团队描述了绘制水母结构图,构建小型合成骨架,然后使用心肌细胞(心脏的肌肉细胞,具有内在的、有节奏的收缩和舒张功能)进行播种。结果是长达几厘米的复制水母,它们在培养基池中游动。他说:“我学到了很多。”
去年,Parker 的团队公布了一些由心肌细胞制成的小型生物混合鱼类。研究鱼类如何产生有节奏的运动,挑战了人们长期以来对心脏起搏点工作方式的假设,揭示了心脏细胞层如何相互交流以创造节律性。2016 年,当该团队展示出形状更接近蝠鲼和鳐鱼的微型心肌细胞射线时,情况也类似。Parker 说,这些机器人射线脉动和转动的运动提供了关于心脏解剖结构为何如此的见解。
Parker 将他的生物混合机器人视为实现修复功能性心脏缺陷目标的途中驿站。他说:“我是一个生物工程师,我用心脏细胞制造东西。” 他补充说:“如果我们想要朝着构建心脏部件的方向发展,你就必须将细胞理解为一种建筑材料。”
他并不是唯一看到生物混合机器人作为研究工具的潜在价值的人。Xu 说,半机械水母可以帮助研究这些动物的生物学,Raman 说,将神经元与肌肉结合可能有助于创建神经肌肉疾病模型。她还尝试将一直在研究的光敏性肌肉组织植回受伤的小鼠体内,以加速它们康复。
漫长的道路
Parker 的生物混合机器人实现了他的目标:它们在实验室中制造和存活,并且它们让他能够回答科学问题。其他生物混合机器人学家面临的问题是,这些机器是否能够实现更诱人、更广阔的愿景。
Webster-Wood 说,生物混合机器人存在许多问题需要解决,才能使生物组织和系统在机器人的创造中更常见。“许多基于组织工程的生物混合机器人仍处于基础研究阶段。” 她说。
除了让生物混合生物足够坚固,可以在野外生存之外,还不确定基于肌肉的系统可以多大程度地超过目前可达到的 1-2 厘米大小。这样的发展可能需要类似于组织血管化的东西,以便所有细胞都能够获得所需的能量和营养。在这方面,Raman 对她的肌肉移植工作感到鼓舞,在该工作中,刺激肌肉收缩似乎促进了受伤小鼠体内血管和神经的生长。“也许可以利用运动来加速血管生长,并制造出更粗壮的东西,”她说。
但也许最大的问题是扩大生产规模。到目前为止,大多数生物混合机器人基本上都是手工制作的。Raman 说,即使是在同一个实验室,不同人制造的设备往往会发生变化——用不同批次的细胞制造的机器人也会发生变化。“这是一个巨大的问题,”她说。为了开始解决可靠的大规模生产问题,Raman 的实验室现在正在研究 3D 打印方法。
Parker 对迄今为止的生物混合努力毫不掩饰地评价说:“这属于工艺品,而不是工程。” 他说,在他的每一篇高影响力的机器人鱼类论文背后,都有多年学习如何用心肌细胞进行构建的经历。为了了解如何将肌肉细胞与合成骨架结合,他的团队使用了描述骨架材料物理特性的方程,来近似计算系统的行为方式。Parker 说:“你必须拥有设计工具。否则,这些都只是派对戏法。”
然而,Sato的雄心壮志远不止于一个简单的派对戏法。他说:“我们的动力纯粹是利用这项技术进行搜救。” “拯救人们脱离灾难。”
至于 Raman,她将长期支持这项研究。她说:“也许我们需要几十年时间才能得到一些可以在培养皿外发挥功能的东西。” “我只是对 30 年的目标感到非常舒服。”


